 热点新闻
热点新闻


深圳市南山区桃源街道深圳大学城哈尔滨工业大学校区 电话:0755-26033876 Copyright@2002-2016 HITSZ.EDU.CN 哈尔滨工业大学(深圳) 粤ICP备 15069706号-1
技术支持:网络与计算中心

演讲人: 贾广鲁
题 目: 大尺寸可折展抓捕机构中变胞机构模块的构型综合
时 间:2020年5月15日星期五 下午14:00
地 点:腾讯会议: 316470804
讲座简介:近年来,螺旋理论因其具有互易积、对偶数等丰富的计算方式和相关理论,被广泛地应用在机构学领域。其中较为熟知的应用是对基于任务的机构进行构型综合。但是现有的构型综合方法都是基于固定自由度的机构,如少自由度并联机构。如何使用螺旋理论对可变自由度机构,即变胞机构进行构型综合尚未有学者提出。该讲座将以变胞机构的可变自由度为出发点,展示新的一类构型综合方法。
个人简介:2016级机械工程博士生。主要研究方向为可折展抓捕机械手的构型设计及优化、块状折纸机构及其运动学特性分析。现已发表学术论文6篇。当前的主要成果是结合螺旋理论,针对变胞机构提出了新型构型综合方法,相关内容已在Mechanism and Machine Theory期刊上发表。
演讲人:韩亮
题 目:人机环交互中协作机器人学习控制方法研究
时 间:2020年5月15日星期四 下午14:00
地 点:腾讯会议316470804
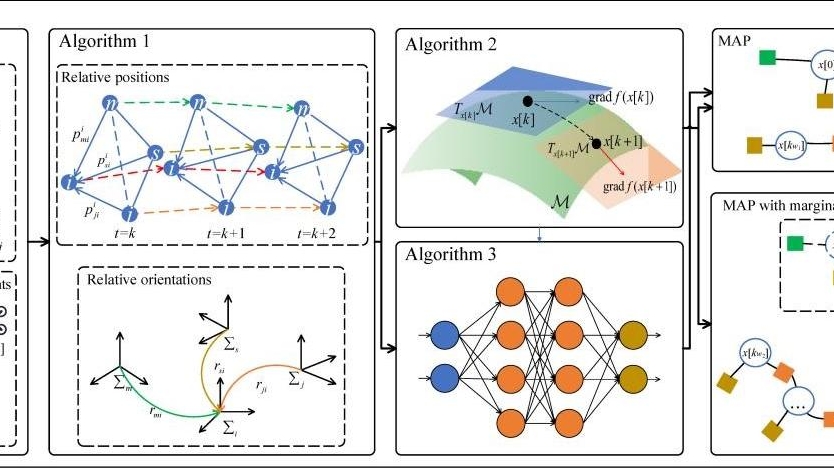
讲座简介:本次讲座面向人-机-环境交互中协作机器人的学习控制算法,以协作臂为研究对象,介绍双臂机器人碰撞检测与协调控制算法、协作机器人的示教学习、协作机器人的曲面学习和人-机-环境交互的自适应控制。主要讲解内容为无力/力矩传感器的双臂机器人碰撞检测与协调柔顺控制算法;具有曲面约束和力控制的示教学习算法;机械臂的自主曲面学习算法;迭代学习控制进一步提高工具姿态对齐精度和力控制的精度和有机融合多种相互作用的统一神经网络自适应控制方法。
个人简介:韩亮,男,汉族。在哈尔滨工业大学(深圳)机电工程与自动化学院机械电子工程专业攻读博士学位,导师是徐文福教授。博士期间主要研究机械臂的规划与控制,包括模块化机械臂的设计、柔顺控制方法、人机协作中学习算法的应用、双臂协调等。获得2019年博士研究生国家奖学金;2018年,工信部创新奖学金三等奖;2016年,工信部创新奖学金二等奖。已发表SCI期刊2篇(IEEE trans),发表国际会议4篇,授权专利6项。
 最新发布
最新发布